by Erin RobotGrrl | Dec 25, 2019 | News, Progress Logs
This is almost a similar step to the previous kit log, but with the motor kit instead. The packing list was created and completed for this kit. Triple checked the count of fasteners, it seems to make sense, so the test will be with the beta testers to see if it is for sure correct.
In the previous kit log we mentioned the next step would be making the packing list for the super bright lights kit – but that was also already done. Some confusion. Currently super bright lights, operator interface, and motor kit are at step 3. This means these kits are waiting to have the assembly photos organized and edited. The next step will be to start tackling this. The power pack instructions also need the written descriptions to be completed.
by Erin RobotGrrl | Dec 18, 2019 | News, Progress Logs
Yesterday the kit log was partially in progress while finishing the operator interface assembly. That is now complete. The steps that followed were finishing the keypad with soldering the buttons, resistors, leds, and of course the joystick. Next was adding the boards to the enclosure, and adding the lids to them. Then taking photos of the finished product.
The kit to complete today was the wheel assembly. Although this one is documented through CAD images, some of the manoeuvres to do assembly can be tricky to see in that format. Additionally, the connector that goes from the motor terminals to the bowie brain should be attached in a certain orientation to ensure smooth changeover between different drive systems. For example, not flipping the wire polarity to cause the robot to go backwards when going forwards.
In the guide, we will have to mention to use JB weld on the hub and shaft. As well as blue threadlock on the set screw. Tonight, these were not added, because we wish to do all 4 in uniform. This means likely needing to disassemble the wheel in the future. However, that might be useful for a video.
Here’s a look at the assembly process:
-
-
Operator interface display in its enclosure
-

-
Operator interface keypad in its enclosure
-

-
Both parts connected, antenna added
-

-
Couldn’t find the flexidisk, it was blending in well
-

-
Here it is!
-

-
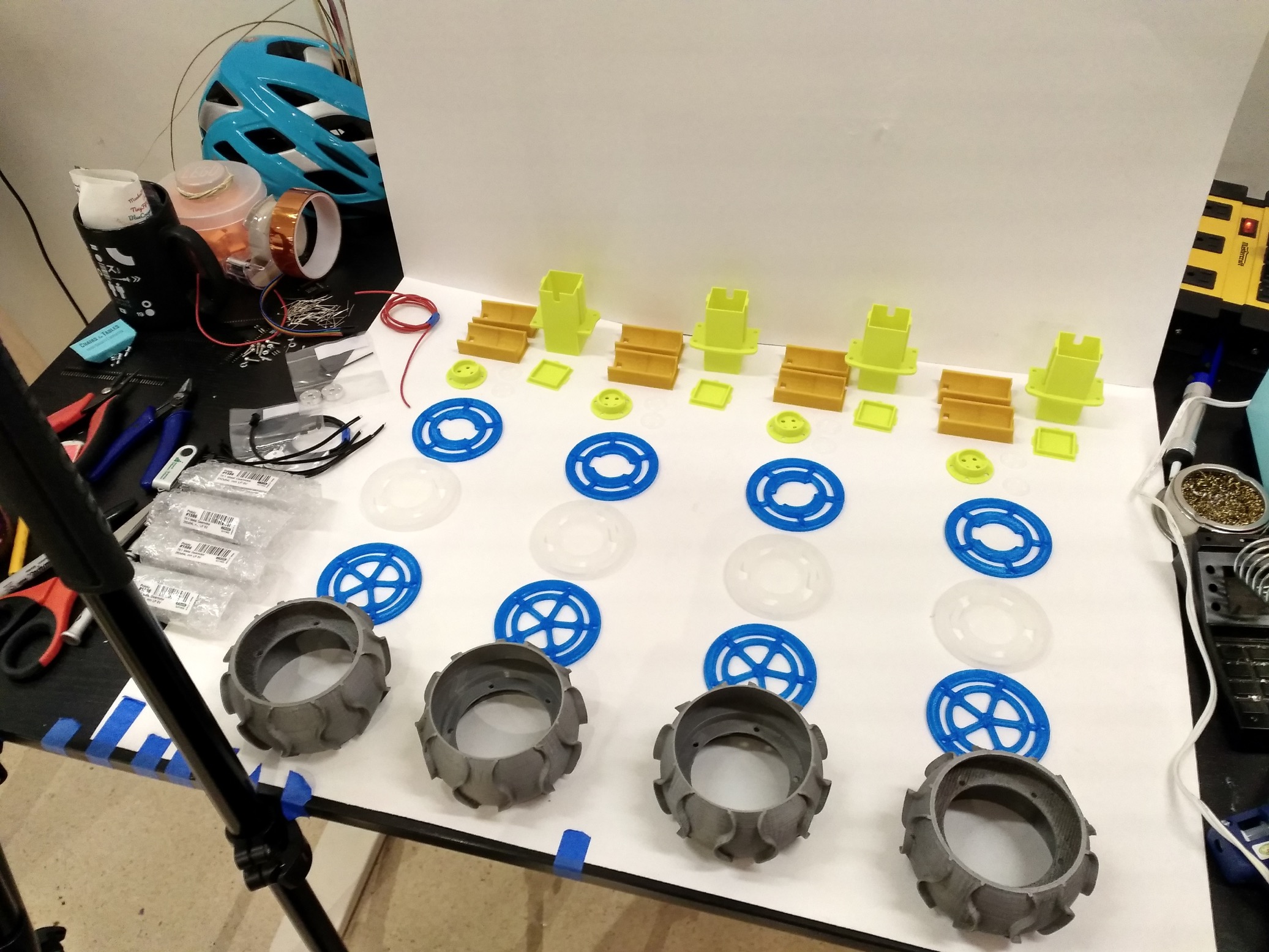
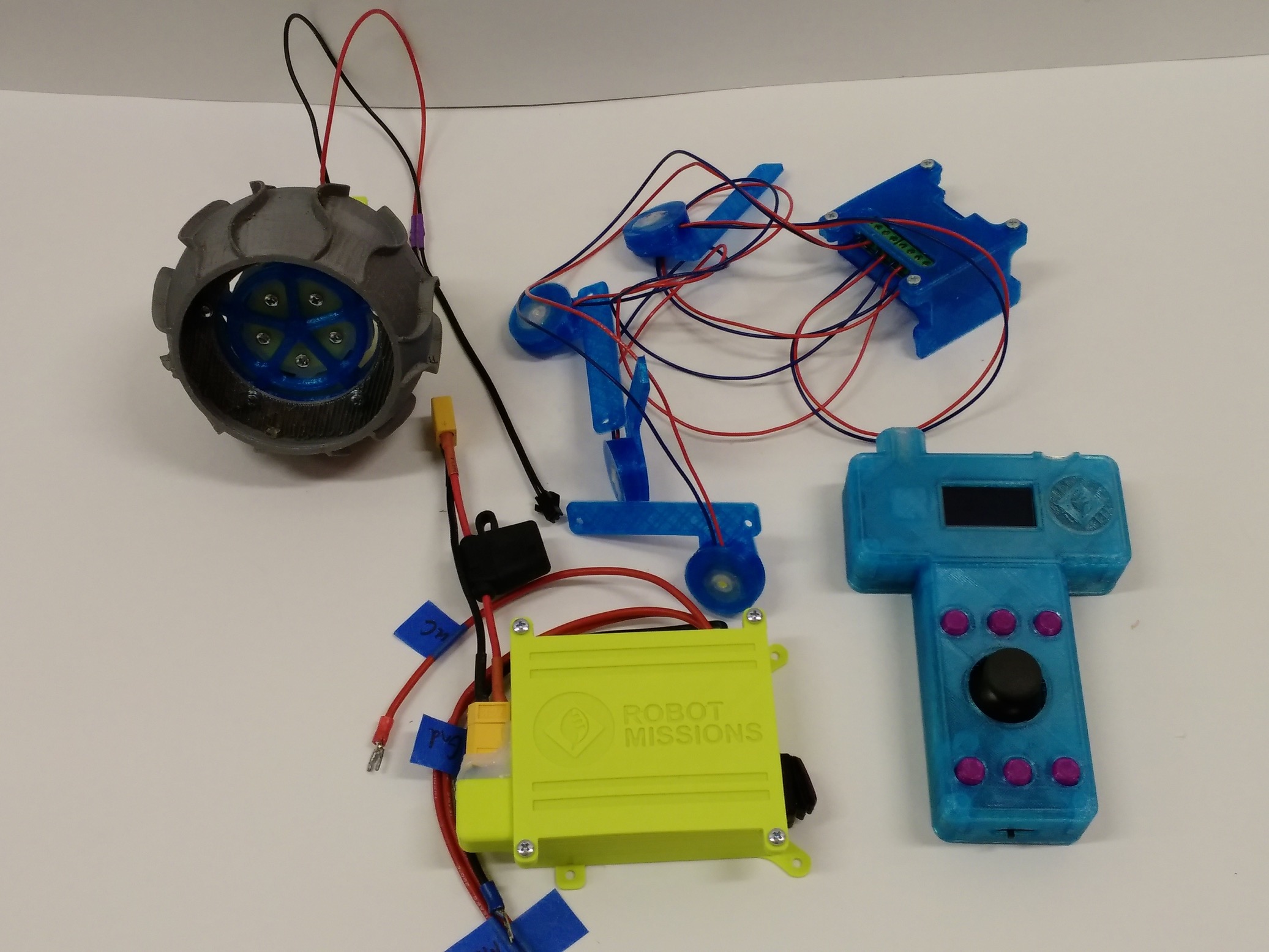
Was trying to capture all 4 wheels components at once, but there were too many for the size
-

-
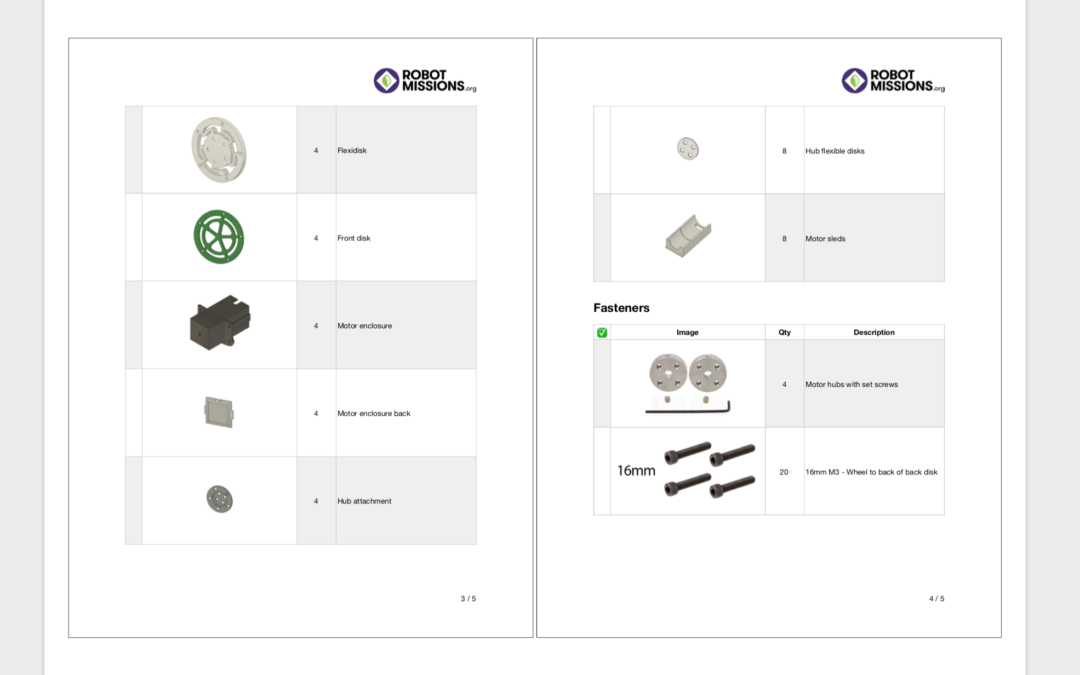
All the fasteners for the 4 wheels. However, 5 nuts * 4 are missing.
-

-
This is the adhesive that is used to permanently attach the hub to the motor shaft
-

-
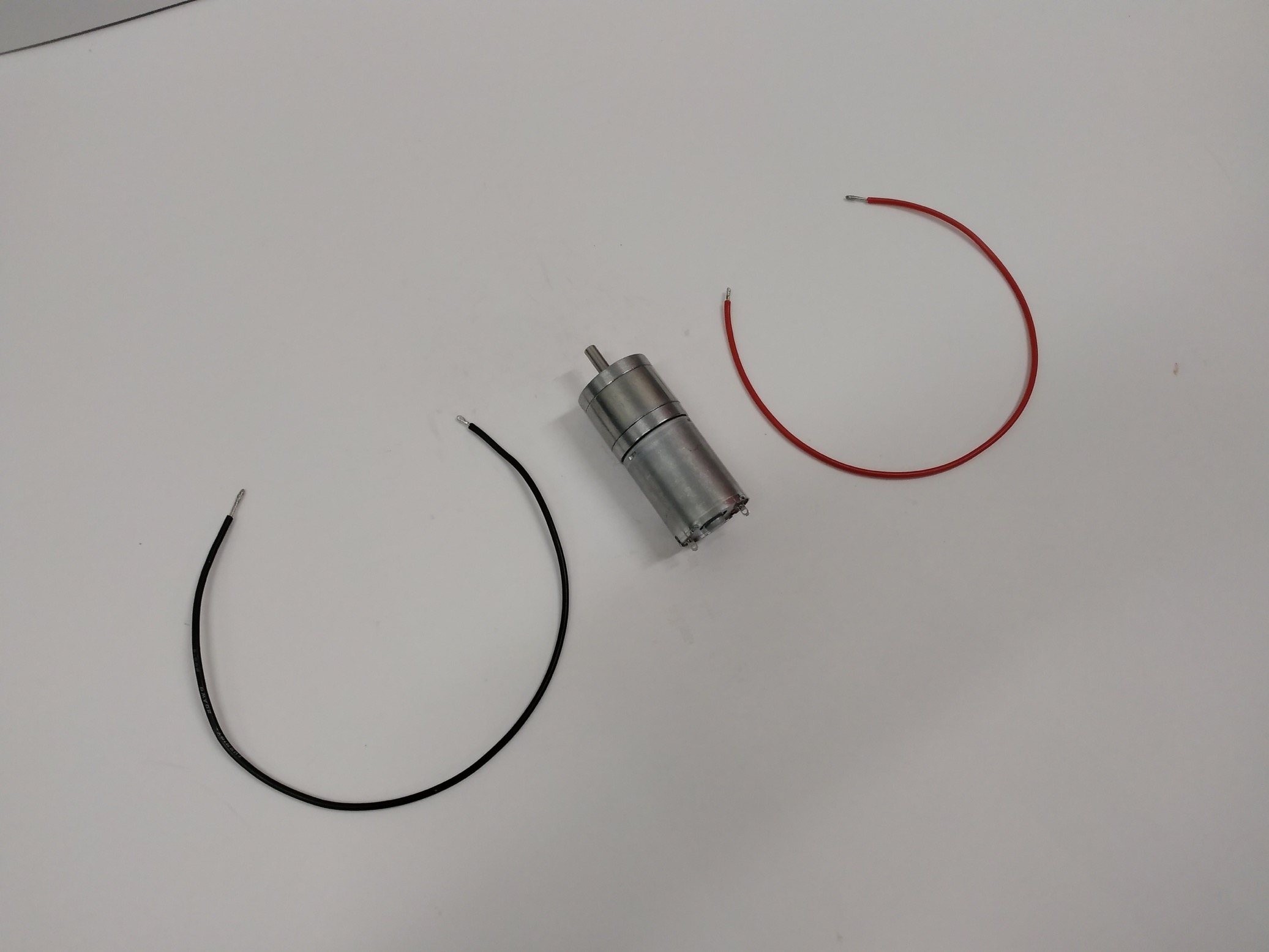
Motor, be ready to become a wheel!
-

-
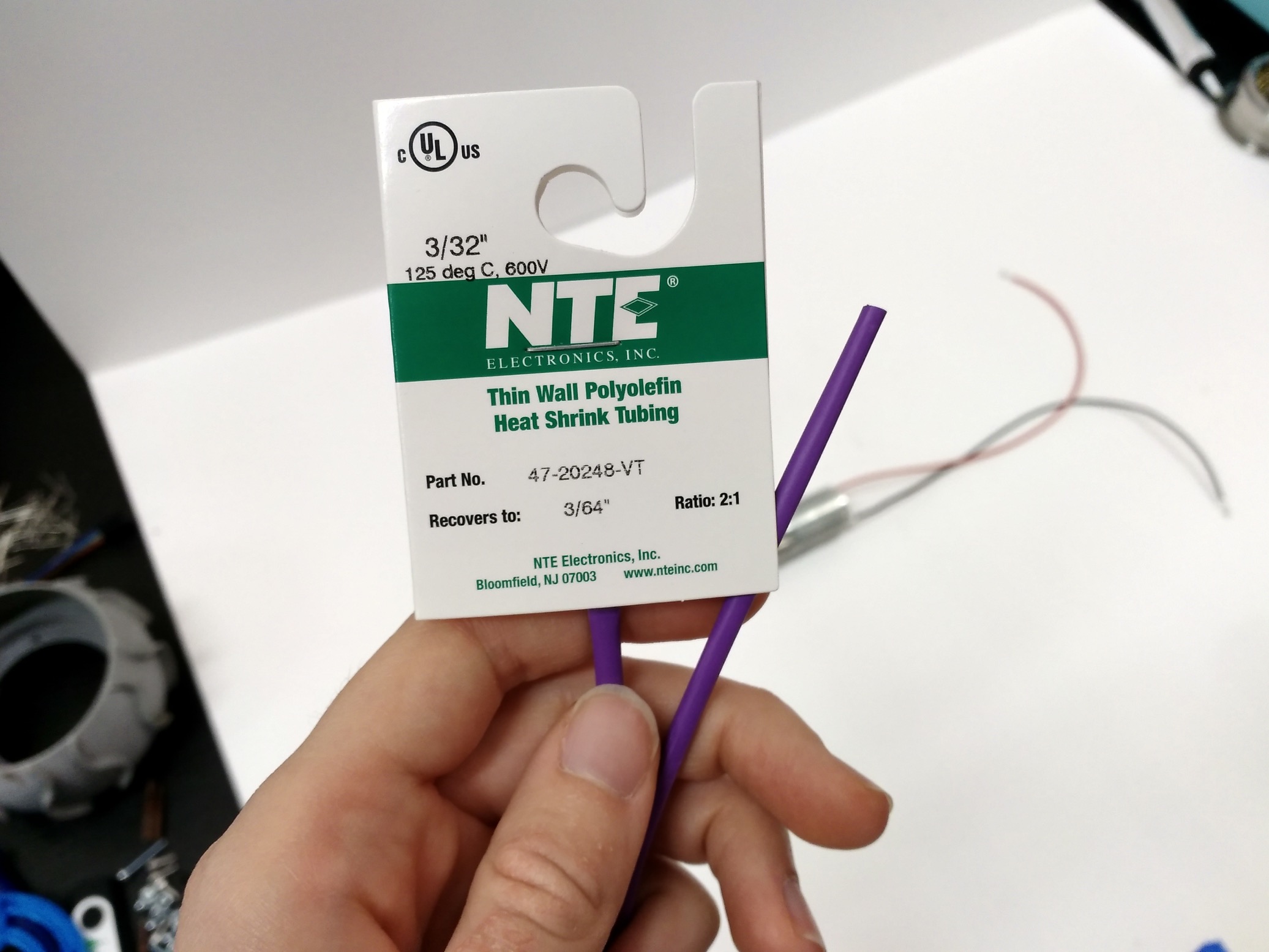
This diameter of heatshrink is very useful for the common hobby gauge wires
-

-
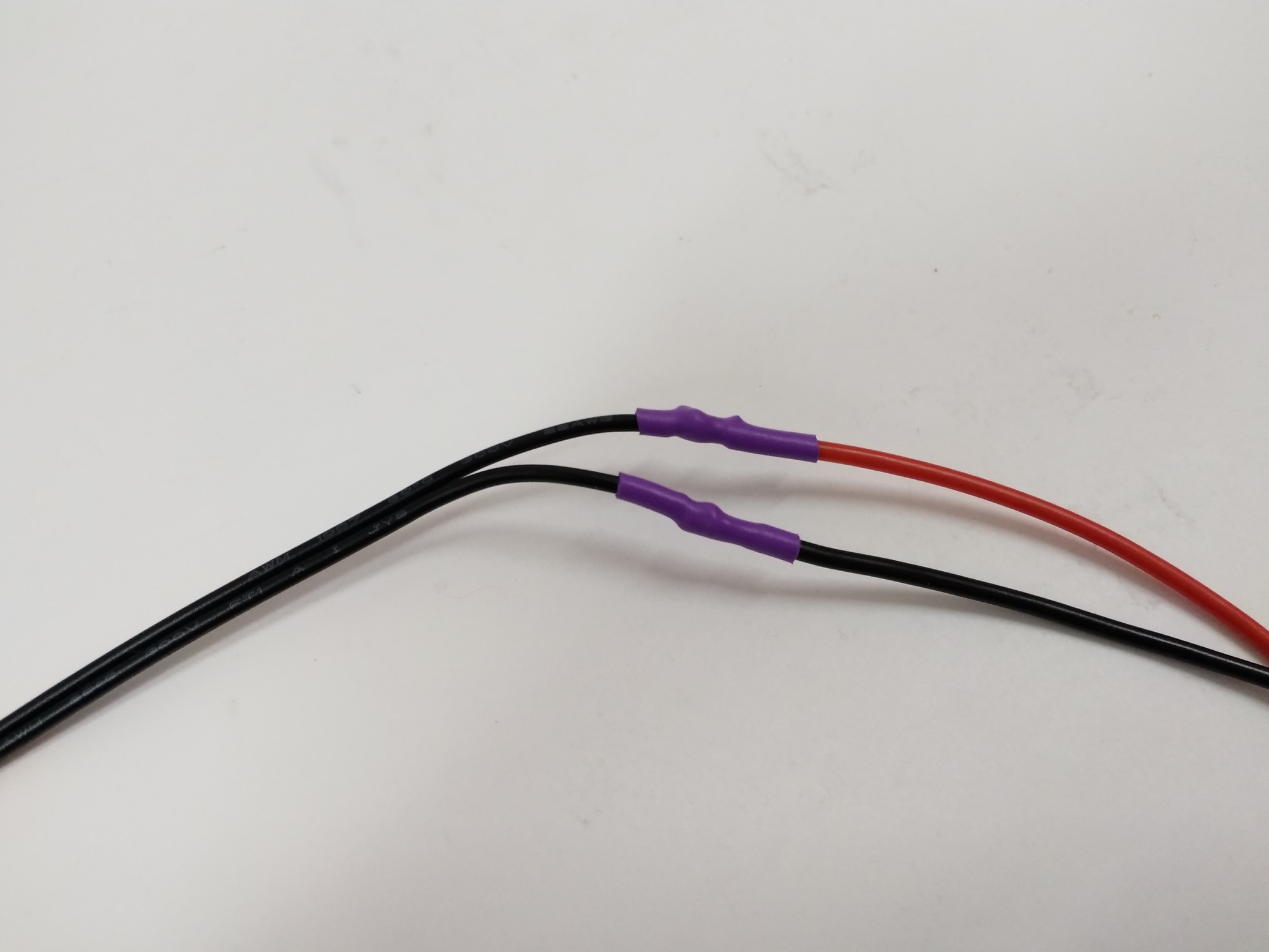
It covers the solder blobs nicely
-

-
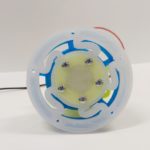
Colour scheme looks cool
-

-
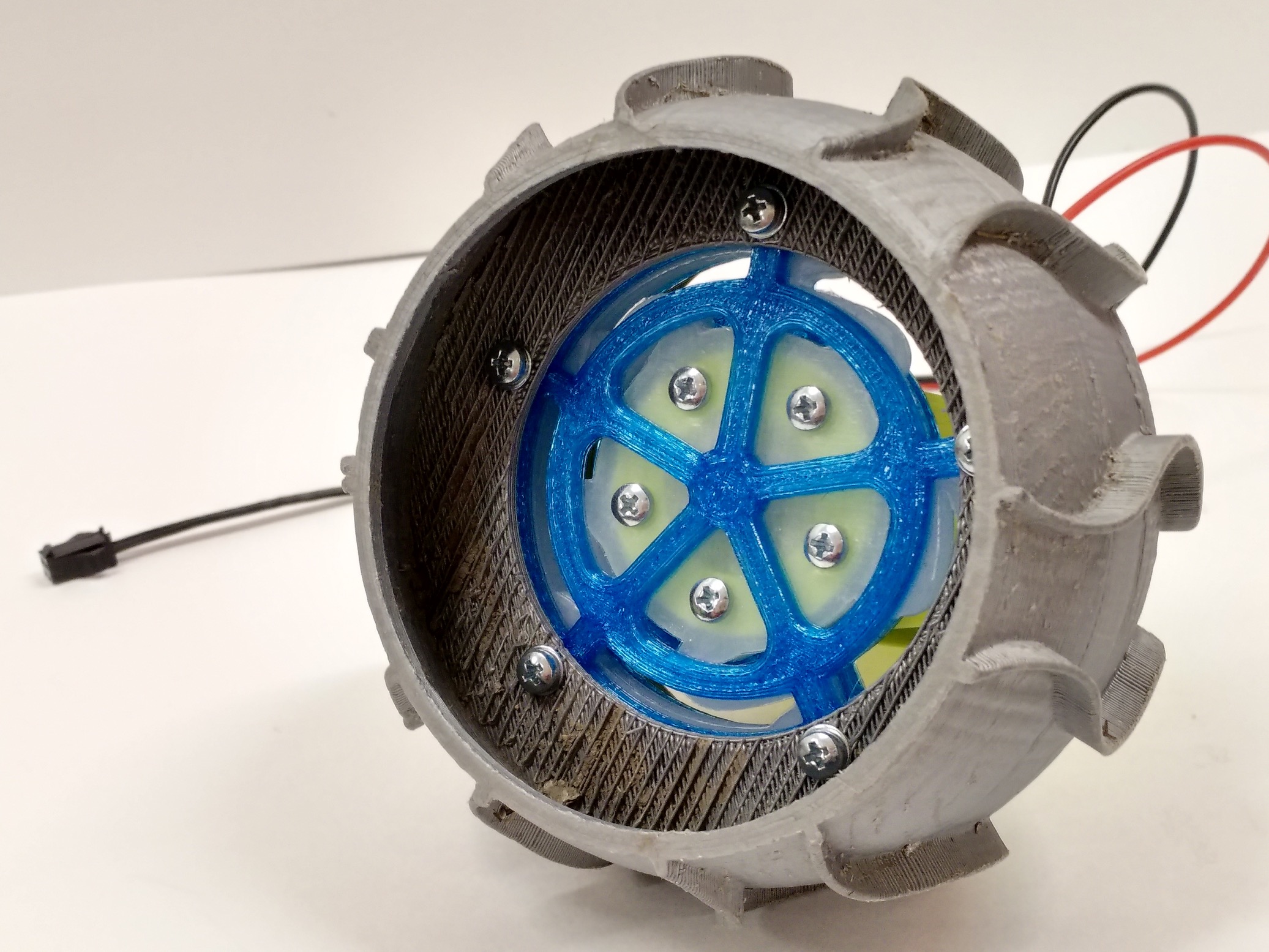
This is the cumbersome part – trying to attach that nut
-

-
There isn’t a lot of space to reach, and the screw doesn’t extend very far
-
-
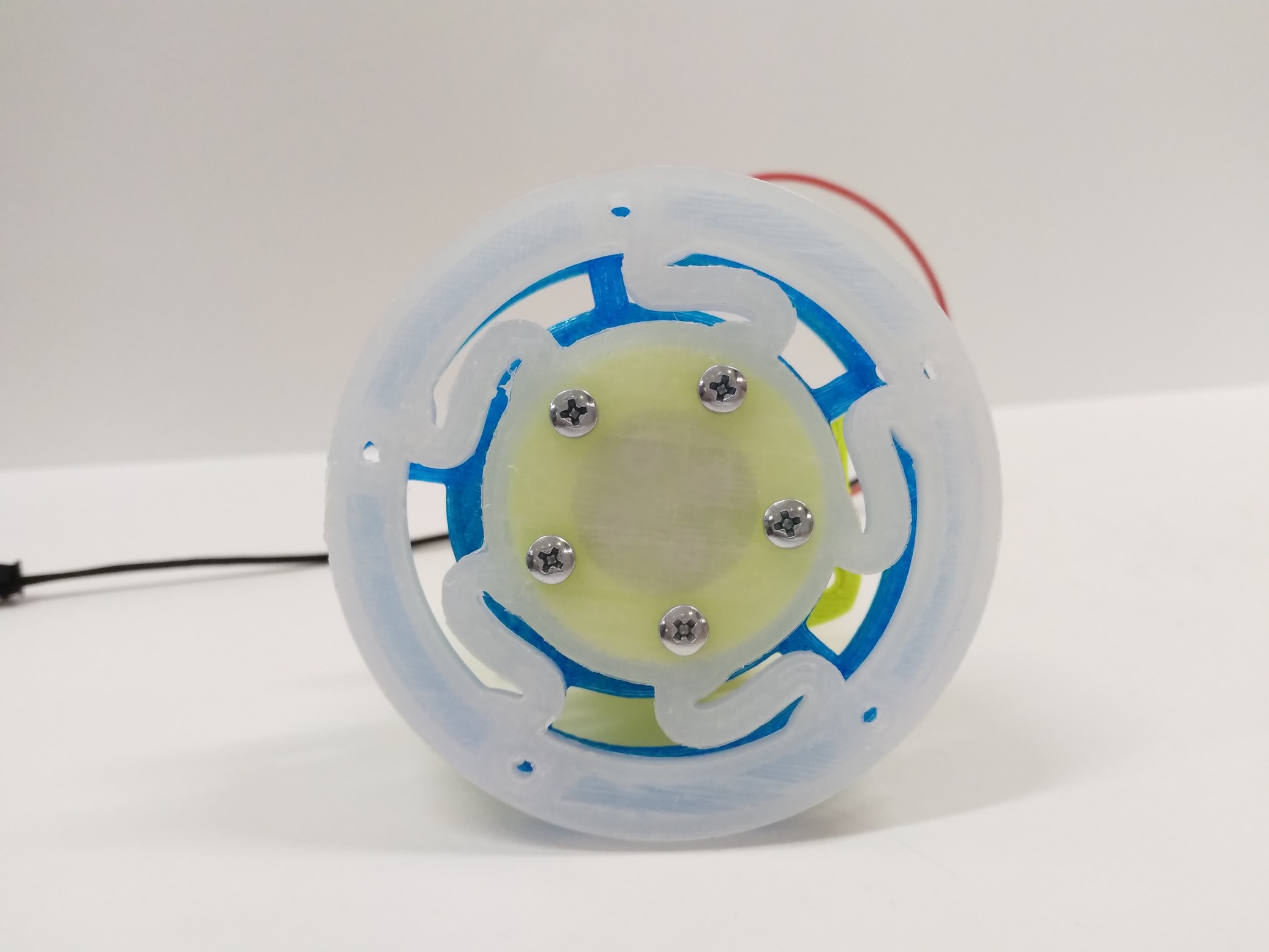
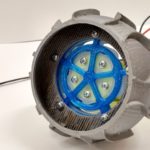
Eventually all 5 were added
-
-
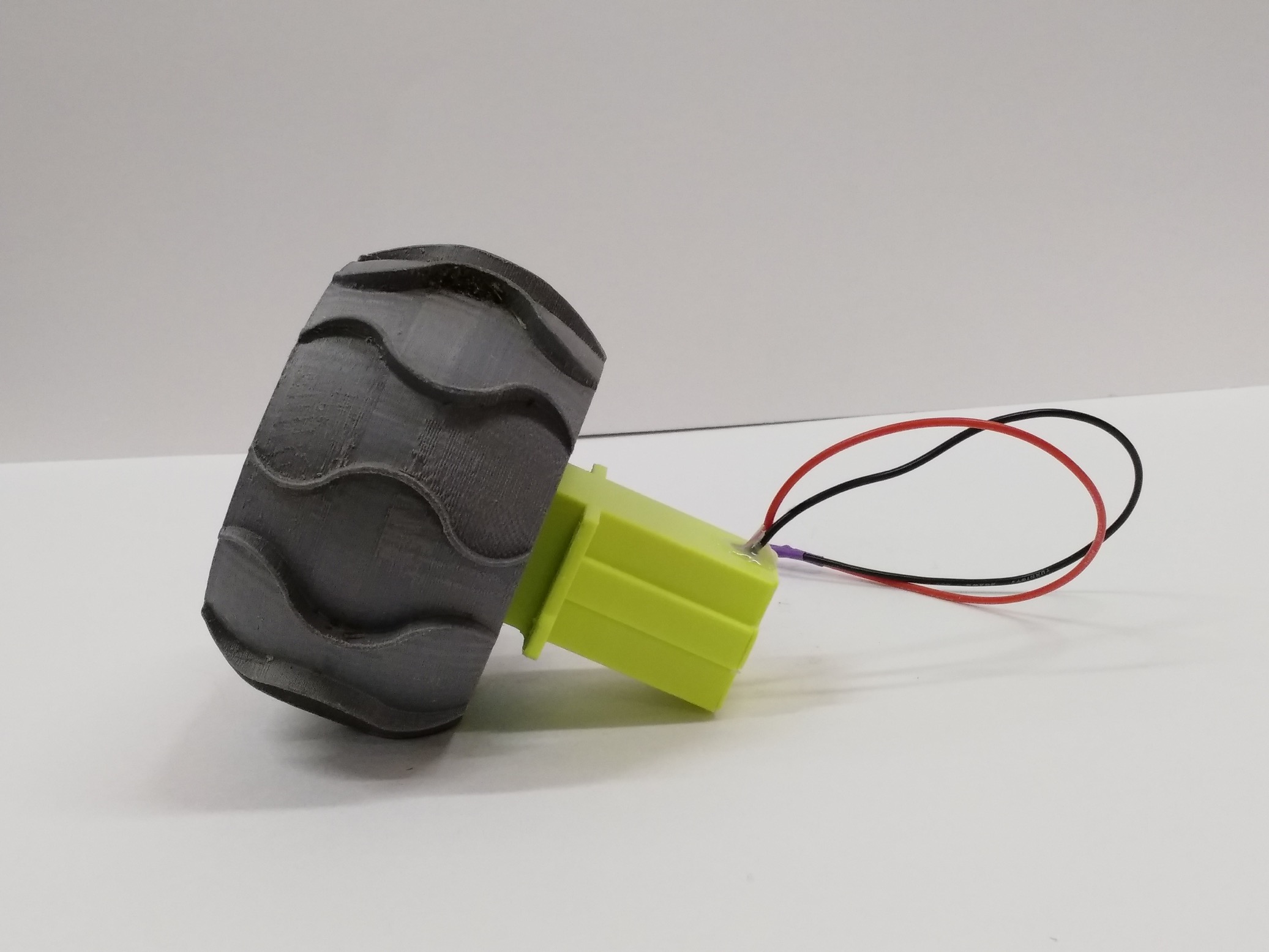
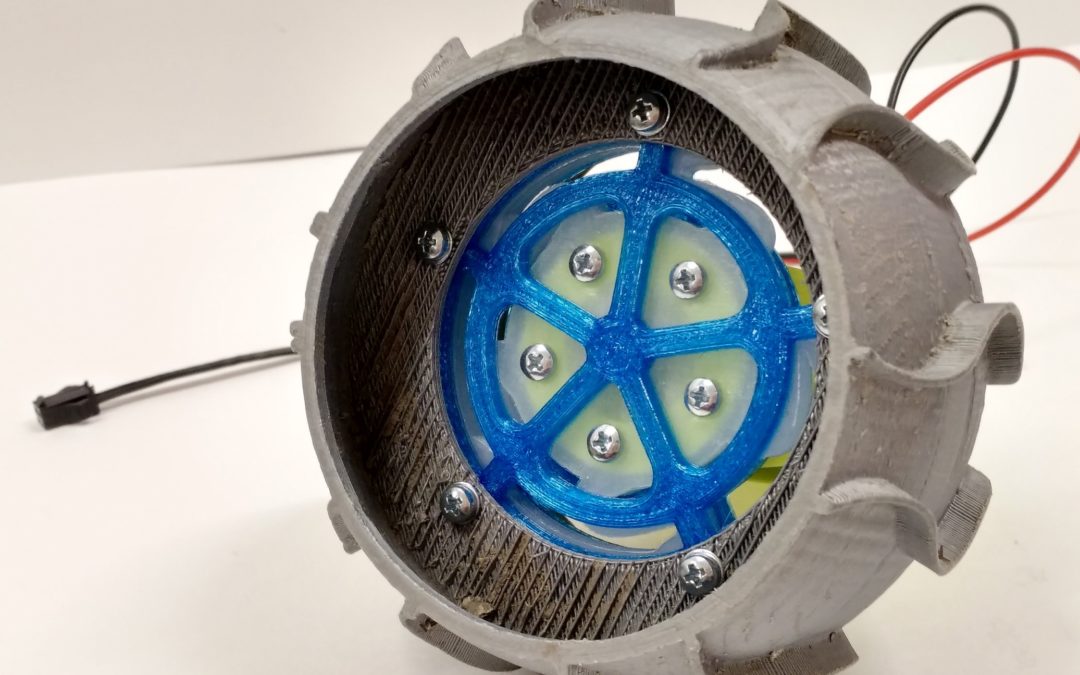
Then the front disk and the wheel added
-

-
If it looks familar, this was one of original bowie’s wheels that it used for several field tests
-

-
Kinda cool to see what has been assembled in the past weeks (not seen: brain kit)
There is a portion on the wheel kit that is very cumbersome to assemble. Not entirely sure the best way to go about organizing bug fixes / upgrades yet. Maybe one way would be to note down all the fixes that might be good to do after beta testing, then triage them into ones that will make the cut. Figuring out the priorities and figuring out support will be something to make sure is ready before the step by step guides go live. The last picture in the gallery is nice to see. Now these kits are on step 3 (brain kit: step 4).
Shoutout to Larry @fast_code_r_us for sending us a tip regarding an Arduino library for the OLED display. Check it out, the ss_oled library. Can’t wait to try this out once we circle back to the operator interface again. Saves us a bunch of time from researching and testing – so thanks for sending this along Larry!